Abstract
Digital Twin (DT) technologies are transforming manufacturing by enabling real-time prediction, monitoring, and control of complex processes. Yet, applying DT to deformation-based metal forming remains challenging because of the strongly coupled spatial-temporal behavior and the nonlinear relationship between toolpath and material response. For instance, sheet-metal forming by the English wheel, a highly flexible but artisan-dependent process, still lacks digital counterparts that can autonomously plan and adapt forming strategies.
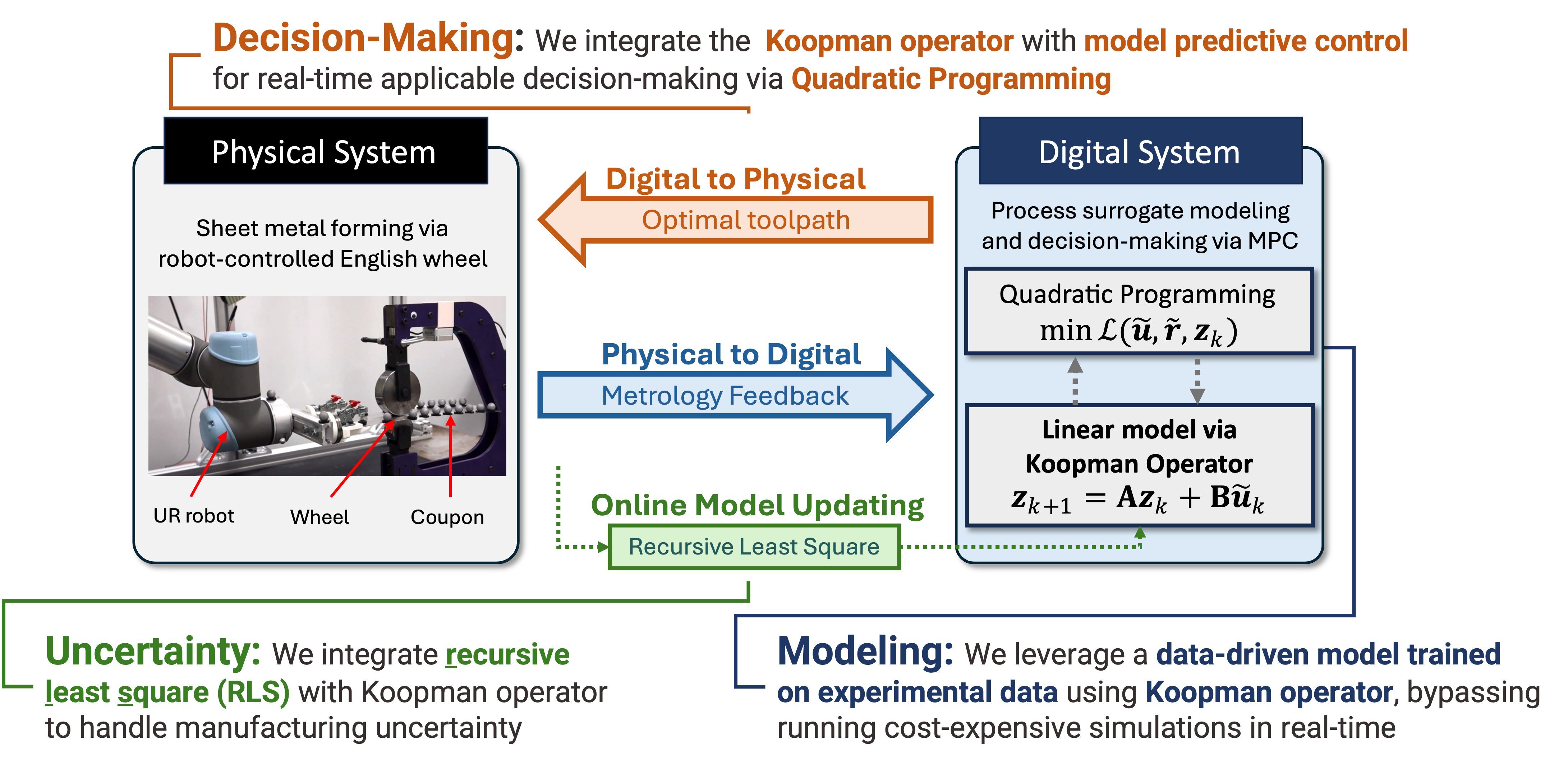
This study presents an adaptive DT framework that integrates Proper Orthogonal Decomposition (POD) for physics-aware dimensionality reduction with a Koopman operator for representing the nonlinear system in a linear lifted space for real-time decision-making via model predictive control (MPC). To accommodate evolving process conditions or material states, an online Recursive Least Squares (RLS) algorithm updates the operator coefficients in real time, enabling continuous adaptation of the DT model as new deformation data become available.
The framework is experimentally demonstrated on a robotic English Wheel sheet metal forming system, where deformation fields are measured and modeled under varying toolpaths. Results show that the adaptive DT can control the forming process to achieve a given target shape by effectively capturing non-stationary process behaviors. Beyond this case study, the proposed framework establishes a generalizable approach for interpretable, adaptive, and computationally-efficient DT of nonlinear manufacturing systems.